Thanks to @generic I got the hmdq data from his brand new Pimax 8k-X and pushed the visualizations and the data to the HMDGDB.
When doing just a quick check over the files I noticed that the stereo overlap on 8k-X is a bit smaller than on 8k+ (or any other Pimax) headset. This might be related to the smaller LCD as being already advertised by Pimax. What bothers me more however, is the way the new headsets (8k+ and 8k-X) handle the HAM.
When I posted my suggestion to modify the HAM in parallel mode so it matches the (projected) shape of the HAM in the native mode (https://community.openmr.ai/t/pimax-5k-parallel-projection-ham-mod/22952) I assumed two things:
- The HAM in the native mode is correct.
- The HAM depends on the hardware features of the headset.
The first point is an assumption, but considering the fact that the HAM in all native modes (Large, Normal,…) is basically the same mesh, probably not correct.
The second point is the very reason for the HAM. It assumes that while the FOV for the rendering is always defined as rectangular (because this is how the rendering nowadays works), the lens shape, the frame shape, the shape of the displays, etc. all limit it mechanically so the user cannot see the full rectangle but only a certain part of it. This is basically the visible FOV.
This FOV does not depend on what FOV the application renders as it is pretty much defined by the headset design, so setting the headset to Large, Normal, Small, etc. should not affect that shape. Which in other words means, that if the Large FOV seems to be limited by the HAM at the extreme periphery, the Small FOV should not be limited at all as it is (visually) only a smaller subset of the Large, with its periphery at the spot where the Large one has still long way to go.
Anyway, what I am saying is that I doubt that the native FOVs are defined consistently in regard to the actual design features of the headset. Basically on any Pimax headset.
Now coming to the new HAMs Pimax introduces for the parallel projection modes:
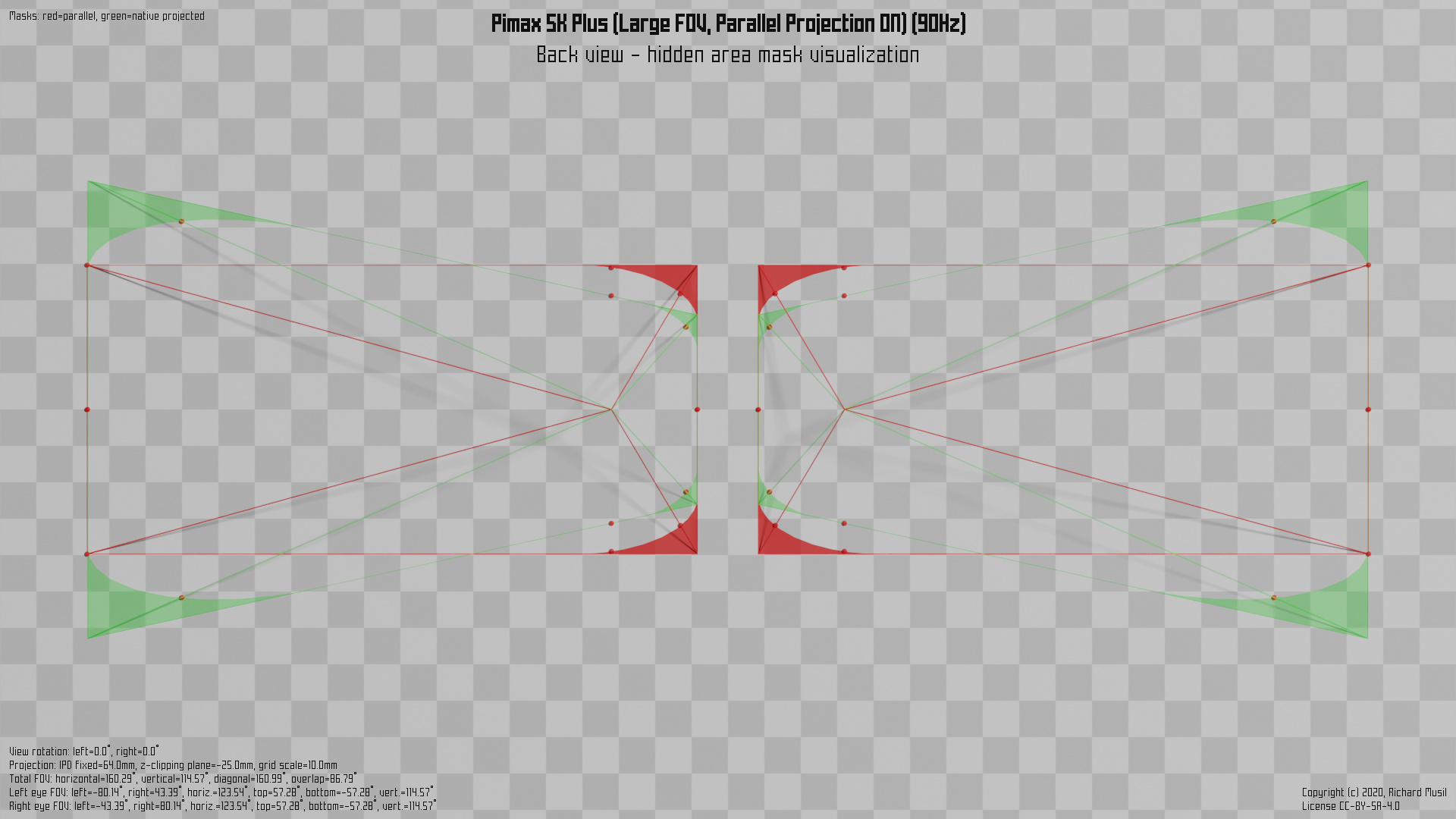
The original HAM on Pimax 5k+/8k in Large FOV and PP on looked like this:
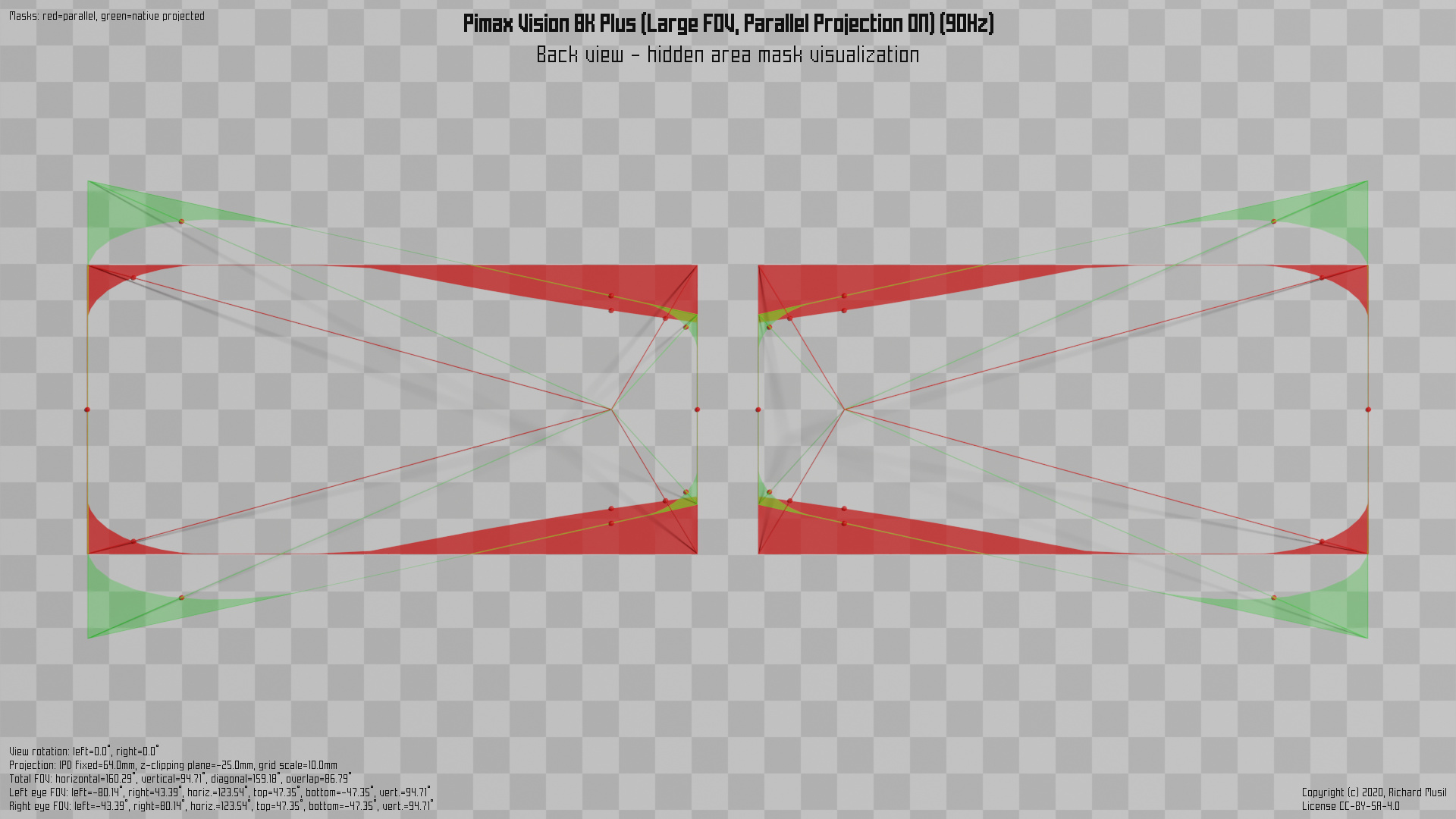
The new one for 8k+ looks like this:
and for 8k-X even like this:
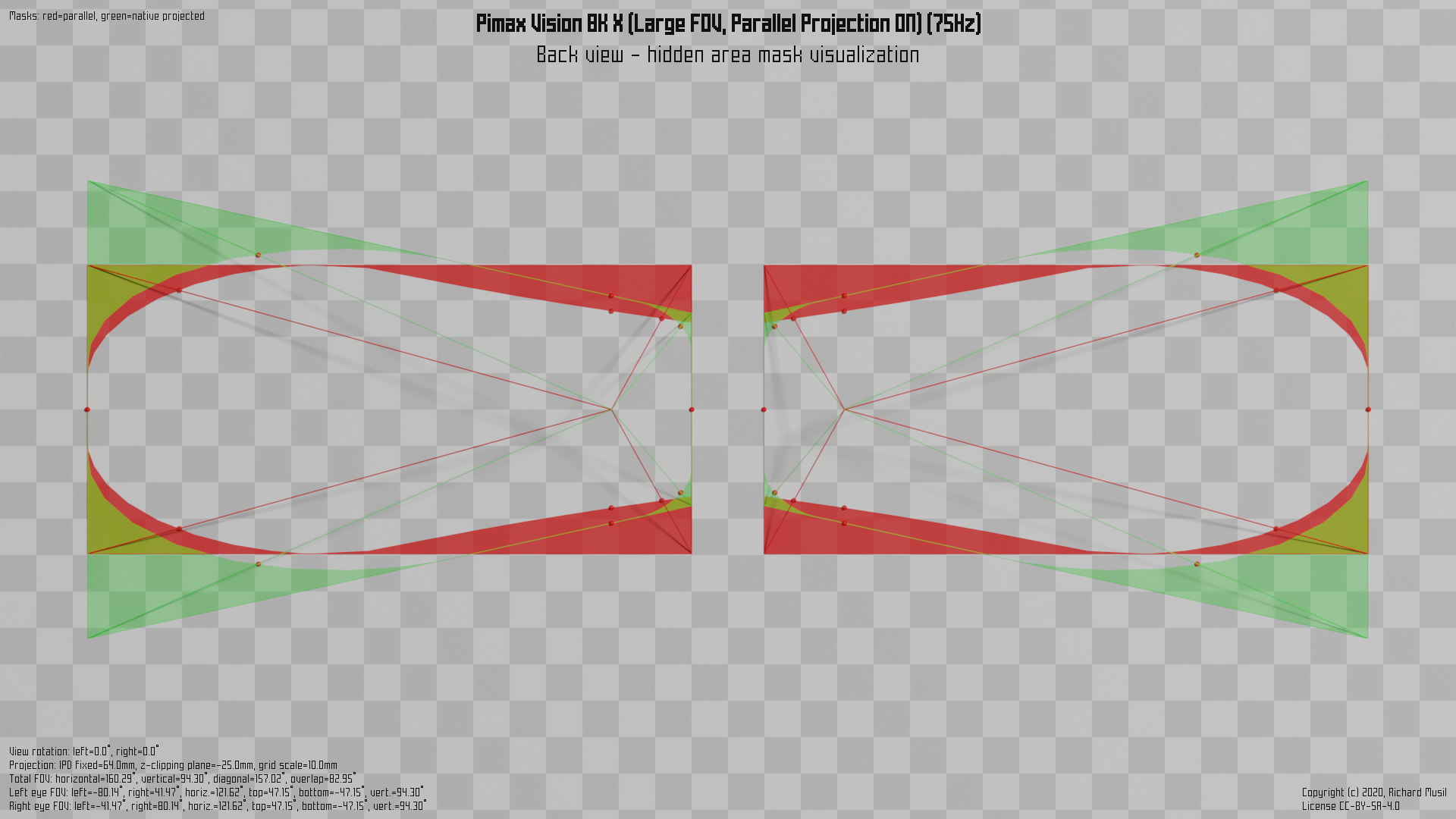
The green shape is the projected HAM from the native mode (for comparison) the red shape is the actual HAM in parallel mode.
Theoretically, the “inner” shapes should be aligned (as I visualized it in my post about the HAM mod), but here the red is limiting the FOV more than the green one, which does not make much sense (as per point 2) above).
So either the native HAM is not defined correctly (and masking less than it should) or the red one masks more than it should! I guess only someone with the headset can confirm that, by looking into the same scene (or using RoV tool) with parallel mode on and off and comparing the visible vertical FOVs. If it does not change then the native is still a “bit loose”, if it does change then the PP HAM is too restrictive.
The discrepancy is somehow present on all types of FOV in the new headsets (they are probably on the old ones with the new firmware too, but I have not yet verified it) but in a different manner. (You can easily compare it by looking at the different HAM images for different FOVs in the database).
It seems that Pimax created a new HAM for the parallel mode and then used the same mesh in all FOVs, which, as the visualized projections show, does not work, because the projected HAM has to be calculated individually for each FOV (basically the way I did it in my mod).



